AVR. Учебный курс
Допустим нам надо подавать команды нашему девайсу. Проще всего это делать посредством обычных кнопок, повешенных на порт. Но одно дело когда кнопок две три, и другое когда их штук двадцать. Не убивать же ради этого двадцать выводов контроллера. Решение проблемы есть — матрицирование . То есть кнопки группируются в ряды и столбцы, а полученная матрица последовательно опрашивается микроконтроллером, что позволяет резко снизить количество нужных выводов ценой усложнения алгоритма опроса.
Клавиатурная матрица.
Я ее нарисовал тебе на первой картинке. Как видишь, там есть строки и столбцы. Кружочками обозначены кнопки. Включены они так, что при нажатии кнопка замыкает строку на столбец.
Считывающий порт включается в режиме Pull-up входа, то есть вход с подтягивающими резисторами. Если контроллер это не поддерживает, то эти резисторы надо повесить снаружи.
Сканирующий порт работает в режиме выхода, он подключен к столбцам. Столбцы должны быть подтянуты резисторами к питанию. Впрочем, если используется полноценный Push-Pull то подтяжка не нужна — выход сам поднимет ногу на нужный уровень.
Работает следующим образом.
В сканирующий порт выводится значение, состоящее из одного нуля и единицы на всех остальных выводах. Пусть, например, ноль будет на выводе А. Наличие нуля сразу же придавливает подтяжку и весь столбец ложится на землю.
Теперь считываем сразу все значение из читающего порта. Если на столбце А не нажата ни одна кнопка, то в порту будут все единички. Но стоит нажать любую кнопку из столбца А, так она сразу же замкнет линию А, на этот вывод порта. В линии А у нас в данный момент 0, это обеспечивает ноль на сканирующем выводе контроллера. Поэтому и на соответствующем выводе порта будет 0
Так что, если будет нажата кнопка, например, 6, то на линии Р1 будет 0.
Потом число в сканирующем порту сдвигается на один бит влево (или вправо) и сканируется второй столбец и так по кругу. В итоге, зная какой столбец мы сканируем, получив ноль на считывающем порту, мы, как по координатам, поймем какая кнопка из матрицы нажата.
Можно определить одновременные нажатия многих кнопок — надо просто делать проверку не по байту, а по конкретному биту.
Увеличение разрядности
Но что делать если у нас кнопок не просто много, а очень много. Что даже матрицирование не спасает от огромного расхода линий порта. Тут приходится либо жертвовать несколько портов, либо вводить дополнительную логику. Например дешифратор с инверсным выходом
.
Дешифратор , это такая микросхема, принимающая на вход двоичный код, а на выходе выдает единицу в выбранный разряд. Т.е. подали число «101» — получили «1» на выводе номер 5. Ну, а у инверсного дешифратора будет 0.
Можно пойти еще дальше и поставить микросхему счетчик, который дергать импульсом с порта, значение со счетчика прогонять через дешифратор. Таким образом, можно влепить сколько угодно выводов, хватило бы разрядности дешифратора. Главное учитывать на каком такте счетчика у нас будет какой столбец.
Если сканируется обычная клавиатура, нажимаемая человеком, то можно не заморачиваться на скорость опроса и сделать его в качестве побочного продукта, повесив на какое-нибудь левое прерывание. Достаточно чтобы клава опрашивалась хотя бы 10-20 раз в секунду. Этого уже достаточно, для комфортной работы.
Дребезг контактов и борьба с ним.
При работе с механическими кнопками возникает одна проблема — дребезг контактов
. Суть его в том, что при замыкании контакт срабатывает не один раз, а в момент замыкания и размыкания происходит несколько срабатываний
. Происходит это от того, что идеальный контакт возникает не сразу, а через какое то время, искрит и скрежещет, хоть это и не видно. Вот и получается, что вместо одного перепада получаем вначале серию всплесков и только потом возникает устойчивое состояние.
Но микроконтроллер работает с такой скоростью, что успевает посчитать эти всплески как устойчивые состояния. Решить эту проблему можно аппаратно, с помощью RS триггера, так и программно — внеся небольшую задержку перед следующим опросом кнопки . Задержка подбирается такой, чтобы дребезг успел прекратиться к ее окончанию.
Отличительные особенности:
- 64- кнопочная клавиатура в виде матрицы 8 х 8
- Не требуется внешних компонентов
- Выход из режима "сна" по нажатию на кнопку
- Легкая интеграция с другими приложениями
- Низкое потребление
- Программный алгоритм антидребезга
- Поддержка альтернативных функций кнопок, которая для сокращения размера программы может быть легко удалена
- Код программы может использоваться любым AVR микроконтроллером, имеющим не менее 17 линий портов ввода - вывода и имеющим прерывание по изменению состояния линий (в настоящее время это только ATmega162 и ATmega169)
- Код может быть легко модифицирован для применения в других микроконтроллерах, использующих общее прерывание (см. пример применения "AVR240: 4 x 4 Keypad - Wake-up on Keypress")
Введение
В данном примере применения описывается программа драйвера интерфейса клавиатурной матрицы 8 x 8. Пример применения разработан для использования в устройствах с автономным питанием. AVR микроконтроллер большую часть времени проводит в режиме сна, активизируясь лишь тогда, когда происходит нажатие кнопок клавиатуры. После этого происходит сканирование клавиатурной матрицы, обработка информации и возврат в режим пониженного потребления.
Также устройство, описываемое в данном примере применения, поддерживает альтернативные программируемые пользователем функции типа Caps Lock, Ctrl-, Shift- и Alt-. Тестовое приложение обслуживает клавиатурную матрицу 4 x 4, каждой кнопке которой соответствует одна цифра и три символа. Альтернативные кнопки позволяют выбрать функцию нажимаемой кнопки.
Рисунок 1. Тестовое приложение
Это устройство подходит для всех приложений, использующих матричную клавиатуру, например, пульты дистанционного управления, мобильные телефоны и системы аварийной сигнализации и контроля доступа. Обновление программного обеспечения производится очень легко за счет наличия у микроконтроллеров семейства ATmega функций самопрограммирования и внутрисистемного программирования. Эти функции особенно полезны при использовании этих микроконтроллеров в универсальных пультах дистанционного управления.
Устройство, описываемое в данном примере применения, построено на микроконтроллере ATmega162. Однако, после небольших изменений код программы может использоваться в микроконтроллере ATmega169.
Принцип действия
Подключение кнопок клавиатурной матрицы 8 x 8 показано на рисунке 2. При нажатии на кнопку происходит соединение соответствующих строк и столбцов. При нажатии на левую верхнюю кнопку происходит замыкание самого левого столбца и самой верхней строки.

Рисунок 2. Подключение клавиатурной матрицы
Клавиатурные матрицы могут сканироваться несколькими способами. Если может быть нажата только одна кнопка, то выбирается быстрый способ сканирования, при котором одновременно выбираются (устанавливается низкое значение) все строки, и считывается состояние столбцов. После этого выбираются все столбцы, и считывается состояния строк. Возвращенные значения столбца и строки объединяются в код, идентифицирующий нажатую кнопку. Этот метод и используется в данном примере применения.
Если необходимо обслуживать клавиатуру, допускающую одновременное нажатие кнопок, то описанный выше метод не может быть использован. В этом случае строки должны быть отсканированы отдельно. Строки должны быть выбраны (устанавливается низкое значение) последовательно, при этом снимается состояние всех столбцов. При этом определяются все нажатые кнопки. Однако в этом случае появляются межсоединения. На рисунке 3 показан результат нажатия трех клавиш, при котором кажется, что нажата еще и кнопка, помеченная иксом. Это приводит к появлению ошибки декодирования.

Рисунок 3. Ложное декодирование при одновременном нажатии кнопок
Для обнаружения нажатия кнопок и пробуждения из режима сна используется прерывание по изменению состояния выводов, имеющееся у используемого AVR микроконтроллера. Перед входом в режим сна на всех выводах строк устанавливается низкий уровень, что приводит к появлению на входах столбцов низкого сигнала при нажатии на кнопки. В результате этого произойдет прерывание.
При использовании прерывания по изменению состояния входа обслуживается только одно нажатие. В этом случае не формируется автоматическое повторение нажатия при удерживании кнопки. Имитация повторного нажатия должна быть реализована отдельной подпрограммой.
Альтернативные кнопки
Многие клавиатурные интерфейсы используют функции вспомогательных кнопок. Реализовано это может быть несколькими способами. Один из самых распространенных методов состоит в выделении нескольких кнопок, которым назначаются альтернативные функции. При одновременном нажатии этих и обычных кнопок формируется вторичной скан-код. Также существуют варианты, когда альтернативная кнопка нажимается непосредственно перед нажатием основной кнопки. В этом случае устраняется необходимость отслеживания одновременных нажатий.
Альтернативные кнопки принимаются во внимание только в том случае, когда нажаты основные кнопки. В этом случае альтернативные кнопки называются "одновибраторными".
Также возможно реализовать "триггерные" кнопки, которые при первом нажатие активизируют альтернативные функции, а при повторном нажатии отключают их. В этом случае используются альтернативные функции для всех нажимаемых впоследствии кнопок. Такие функции имеет кнопка Caps Lock на стандартной компьютерной клавиатуре. В данном примере применения используется как одновибраторные, так и триггерные кнопки.
Использование принципа последовательного, а не одновременного нажатия кнопок позволяет избежать проблем, связанных с ошибочным декодированием. Если нажато несколько кнопок одновременно, то приложение просто проигнорирует это.
Дребезг контактов
На рисунке 4 показан дребезг контактов при нажатии на кнопку. Как видно, происходит имитация многократного нажатия. Для того, чтобы избежать неправильного декодирования, считывание скан-кода производится через некоторое время, после того, как произошло прерывание по изменению состояния. Также этот алгоритм, называемый антидребезгом, позволяет избежать ложных срабатываний при воздействии шумов. Подавление дребезга контактов может быть реализовано и при помощи аппаратного или цифрового фильтра, но используемый в данном примере применения метод требует наименьших затрат.

Рисунок 4. Дребезг контактов
Реализация
В данной реализации использован микроконтроллер ATmega162. Рекомендации при переходе на микроконтроллер ATmega169 перечислены в конце данного документа.
Клавиатура подключается к двум 8- битным портам AVR микроконтроллера. Один порт (порт D) настроен на работу всех линий в качестве выходов и подключен к строкам клавиатурной матрицы. Другой порт (порт C) настроен на работу всех линий в качестве входов и подключен к столбцам клавиатурной матрицы. Подробнее это можно увидеть на рисунке 2. При сканировании клавиатурной матрицы порт, используемый как выходной, должен удерживать выходы в низком состоянии, а порт, используемый как входной должен иметь встроенные подтягивающие к питанию резисторы.
Описываемое устройство использует первую линию порта Е для формирования последовательного кода, соответствующего коду нажатой кнопки. Данные передаются при помощи встроенного UART, использование которого описанного в примере применения AVR306.
При обычном нажатии формируется скан-код, значение которого лежит в диапазоне от 0 до 63 (8 строк * 8 столбцов). Нажатие кнопки вызова альтернативной функции также формирует обычный скан-код, но кроме этого устанавливаются соответствующие флаги альтернативных функций. Эти флаги состояния хранятся в глобальной переменной.
Три кнопки вызова альтернативных функция настроены на работу в режиме триггерных кнопок, а четыре - как одновибраторные. При нажатии на эти кнопки формируется обычный скан-код, что позволяет приложению обрабатывать их как и обычные кнопки.
Другая глобальная переменная используется для передачи приложению скан-кода вместе с флагами. Шесть младших бит используются для передачи кода (от 0 до 63), а старший значащий бит (СЗБ) указывает на изменение состояния. Драйвер клавиатуры устанавливает этот бит при нажатии кнопки. Приложение опрашивает этот бит и сбрасывает его после считывания скан-кода. Глобальный байт и скан-слово показаны на рисунке 5.

Рисунок 5. Расширенный скан-код
Программа клавиатурного драйвера реализована как программа обработки прерывания. Основная программа переводит микропроцессор в режим сна. При нажатии на кнопку драйвер клавиатуры пробуждает AVR микроконтроллер, получает скан-код и обновляет глобальные байты. После выполнения функций нажатых кнопок основная программа снова переводит микроконтроллер в режим сна.
Модуль инициации и основная программа
На рисунке 6 показан модуль инициализации и основная программа. Сброс флагов альтернативных функций и глобальных переменных, а так же инициализация портов описаны выше. Если не требуется производить никакой обработки, то выбирается Idle режим сна.

Рисунок 6. Модуль инициации и основная программа
Основной модуль декодера клавиатуры Декодер клавиатуры представляет собой подпрограмму обработки прерывания по изменению состояний портов. Сначала выбирается Idle режим сна, позволяющий AVR микроконтроллеру активизироваться по переполнению таймера, что невозможно при нахождении микроконтроллера в Power-down режиме сна. Таймер устанавливается на формирование прерывания через 5 мс, что вполне достаточно для окончания переходных процессов сигналов на выводах. В течение этого времени задержки основная программа восстанавливает управление и может активизировать режим сна. По окончании времени задержки вызывается процедура обработки нажатия кнопок. Эта функция завершает определение кода нажатой кнопки. По окончании ее на линиях портов всех строк устанавливается низкий уровень и активизируется Power-down режим сна, выход из которого возможен по нажатию на кнопку. Блок-схема этого программного модуля показана на рисунке 7.
Рисунок 7. блок-схема основного программного модуля декодера клавиатуры
Сканирование клавиатуры (обработка нажатия кнопок) На рисунке 8 приведена блок-схема подпрограммы сканирования клавиатуры. Сначала сканируется результат по столбцам. Три младших бита скан-кода (столбцы) увеличиваются до тех пор, пока не будет найден низкий уровень на линии столбца. После этого происходит инвертирование направленности линий портов и сканирование повторяется. При этом производится поиск низкого уровня на линиях строк. После этого вызывается подпрограмма обработки скан-кода.

Рисунок 8. Блок-схема подпрограммы сканирования клавиатуры
Сначала функция обработки скан-кода копирует сформированный скан-код в глобальную переменную. После этого скан-код сравнивается с кодами кнопок альтернативных функций и формируются соответствующие флаги альтернативных функций. Эти флаги копируются в глобальную переменную. Если нажатая кнопка не является альтернативной, то флаги всех одновибраторных альтернативных функций сбрасываются. Наконец, устанавливаются новые флаги. Блок схема этой функции приведена на рисунке 9.

Рисунок 9. Блок-схема функции обработки скан-кода
Тестовый пример применения myCellPhone
Существует тестовый пример применения, в котором реализована клавиатурная матрица, напоминающая клавиатуру сотового телефона. Конечные символы в нем передаются по USART интерфейсу. Используя клавиатурную матрицу 4 x 4 можно сформировать все цифры и символы, которые можно обеспечить при помощи еще четырех кнопок вызова альтернативных функций. Три кнопки используются для выбора альтернативной функции каждой основной кнопки, а четвертая выполняет роль кнопки Caps Lock (переключение между верхним или нижним регистрами).
Для преобразования скан-кодов в кодовые комбинации, соответствующие кодам нажатых кнопок с учетом кнопок альтернативных функций, используется таблица преобразования. Скан-код может быть использован и для сканирования клавиатурной матрицы 8 x 8. Таким образом, таблица должна иметь 8 входов на строку, притом, что используется только 4 кнопки в каждой строке. Таким образом, при увеличении количества столбцов клавиатурной матрицы изменения размера программы не произойдет.
Размер кода прикладной программы и временные параметры
Размеры кодов подпрограмм различных функций обработки клавиатурной матрицы приведены в таблице 1.
Таблица 1. Размеры кодов подпрограмм различных функций обработки клавиатурной матрицы
В таблице 2 приведены длительности выполнения различных действий микроконтроллером ATmega162, работающем на частоте 8 МГц. Здесь приведены последовательности действий от пробуждения при обнаружении нажатия кнопки до входа в режим сна после обработки нажатых кнопок.
Таблица 2. Длительности выполняемых последовательностей действий
Если не учитывать Power-down режим сна, то видно, что большую часть времени микроконтроллер работает в Idle режиме сна. В активном режиме микроконтроллер находится всего 0.3 мс, что составляет около 0.5 % от общего времени. Относительное время нахождения в различных рабочих режимах приведено в таблице 3.
Таблица 3. Потребление и относительное время нахождения микроконтроллера в различных рабочих режимах
Если предположить, что кнопки нажимаются раз в 10 минут, то среднее потребление составит всего 2 мкА.
Рассуждения об использовании других микроконтроллеров
Единственное отличие при использовании микроконтроллеров ATmega162 и ATmega169 состоит в том, что у них должны использоваться разные порты для подключения клавиатурной матрицы. ATmega162 использует порт C, в то время как у ATmega169 должен использоваться порт Е. Это вызвано тем, что у них различные порты имеют прерывание по изменению состояния линий. ATmega162 имеет функцию формирования прерывания по изменению состояния линий порта С, а ATmega169 - по изменению состояния линий порта Е. Если необходимо использовать другие альтернативные функции этих портов, то необходимо модифицировать приложение таким образом, чтобы использовать для подключения клавиатурной матрицы другой порт, имеющий функцию формирования прерывания по изменению состояния линий.
Также обратите внимание, что для активизации режима сна ATmega169 использует SMCR регистр.
При использовании других микроконтроллеров понадобятся дополнительные внешние компоненты и изменение используемого прерывания. Использование таких микроконтроллеров для обработки клавиатурной матрицы 4х4 описано в примере применения AVR240. Остальные функции описанного примера применения в изменениях не нуждаются.
Зачастую свободных выводов микроконтроллера не хватает для подключения необходимого количества кнопок. При непосредственном соединении для n кнопок надо выделить столько же линий ввода-вывода, что не всегда возможно. Для более рационального использования линий портов можно воспользоваться матричной схемой подключения на рис.1. В данном случае матрица, подключённая к порту D, имеет размер 4*4=16 кнопок (4 строки r0…r3 и 4 столбца с0…с3). Линии PD0…PD3, являющиеся строками r0…r3, всегда настроены на ввод, и подтянуты к шине питания резисторами R (типичный номинал 4,7…10 кОм). С них и производится считывание состояния кнопок SB1-SB16. На линиях PD4…PD7 (столбцы с0…с3) поочерёдно формируется сигнал логического нуля. Первоначально низкий уровень устанавливается на столбце с0, а на всех остальных столбцах при этом Z-состояние. Теперь только при нажатии кнопок этого столбца (SB1…SB4) на линиях строк r0…r3 может возникнуть низкий логический уровень. Далее логический 0 выставляется на столбце с1 и сканируются группа кнопок SB5…SB8 и т.д. Точно такой же алгоритм опроса кнопок применяется и для любой другой матричной клавиатуры не зависимо от числа строк и столбцов. В общем случае количество кнопок n является произведением числа строк и столбцов. Так, например, матрица 2*2 (4 линии) будет содержать 4 кнопки. Но с другой стороны столько же линий ввода-вывода понадобится и для непосредственного подключения того же числа кнопок. Таким образом, экономия выводов начинает проявляться при числе кнопок, превышающем 4…6, и становится ещё более существенной с ростом их количества.
Рис.1 Матричная схема подключения кнопок
Элементы VD1…VD4, и R1…R4 не являются обязательными на схеме. Диоды служат для защиты от короткого замыкания между линиями строк и столбцов. Если, например, при нажатии на кнопку SB1 (в момент сканирования столбца c0) линия строки r0 вдруг окажется настроенной на вывод и на ней будет высокий логический уровень, то по цепи c0r0 начнет протекать недопустимо большой ток. Хотя логика программы не допускает такого режима работы, по разным причинам это все-таки может произойти. Поэтому, по крайней мере, при отладке программы диоды не будут лишними. Если емкость монтажа, приведенная к выводам PD3…PD0, не слишком велика, то сопротивления подтяжки к шине питания, вполне можно заменить внутренними “pull-up” резисторами. Для этого необходимо установить соответствующие разряды в регистре PORTD, когда линии настроены на ввод.
Пример подпрограммы сканирования матричной клавиатуры
Def button = R16 ;регистр с кодом нажатой кнопки.def temp = R17 ;регистр для промежуточных операций ldi temp,high(RAMEND) ;инициализация стека out SPH,temp ldi temp,low(RAMEND) out SPL,temp . clr temp ;настраиваем линии порта D на ввод out DDRD,temp ldi temp, (1 << PD0)|(1 << PD1)|(1 << PD2)|(1 << PD3) out PORTD,temp . rcall btn_pol . ; Подпрограмма опроса матричной клавиатуры; R16 – номер нажатой кнопки на выходе из подпрограммы, ; если ни одна кнопка не нажата, то R16=0; ; если нажаты две и более кнопок, то R16=0xFF ; R17 – регистр для определения номера строки; R18 – регистр для задания номера столбца; R19 – счётчик столбцов; R20 – регистр для промежуточных операций btn_pol: clr R16 ;обнуляем регистры с кодом нажатой clr R19 ;кнопки и номером столбца ldi R18,0x0F ;очищаем регистр данных PORTD порта D out PORTD,R18 ldi R18,0x00010000 bp1: out DDRD,R18 ;настраиваем на вывод линию соответствующего nop ;столбца через регистр DDRD порта D in R17,PIND ;считываем состояние строк из регистра PIND com R17 andi R17,0x0F ;выделяем значение 4-х строк ldi R20,0 ;если ни одна кнопка в столбце не нажата, breq bp5 ;перемещаемся на следующий столбец cpi R17,0x01 ;если нажата кнопка в строке c0, ldi R20,1 ;то вычисляем её номер breq bp2 cpi R17,0x02 ;если нажата кнопка в строке c1, ldi R20,2 ;то вычисляем её номер breq bp2 cpi R17,0x04 ;если нажата кнопка в строке c2, ldi R20,3 ;то вычисляем её номер breq bp2 cpi R17,0x08 ;если нажата кнопка в строке c3, ldi R20,4 ;то вычисляем её номер brne bp3 ;если нажато более одной кнопки, завершаем опрос bp2: tst R16 ;если в предыдущих столбцах были нажаты breq bp4 bp3: ldi R16,0xFF ;кнопки, то завершаем опрос с кодом 0xFF ret bp4: push R19 ;иначе вычисляем номер кнопки, как lsl R19 ;N = 4*column + row + 1 = 4*R19 + R20 + 1 lsl R19 add R20,R19 mov R16,R20 pop R19 bp5: inc R19 lsl R18 cpi R19,4 ;повторяем цикл опроса пока не будут brne bp1 ;опрошены все 4 столбца ret
При всех преимуществах матричная схема подключения обладает и одним недостатком. С её помощью тяжело реализовать чтение комбинаций кнопок. В случае, когда на такой клавиатуре будут нажаты любые три кнопки, образующие между собой прямой угол (например, SB1,SB2,SB5), то программой опроса будет зафиксировано ложное нажатие кнопки, лежащей в свободном углу прямоугольника (в данном случае SB6). При определённом раскладе такой “фантомной” кнопкой может оказаться любая кнопка на клавиатуре.
Список радиоэлементов
| Обозначение | Тип | Номинал | Количество | Примечание | Магазин | Мой блокнот |
|---|---|---|---|---|---|---|
| DD1 | МК AVR 8-бит | ATmega8 | 1 | В блокнот | ||
| VD1-VD4 | Диод | 4 | В блокнот | |||
| R, R, R, R | Резистор | 4 |
За десятилетия в электронике сложилась практика при помощи различных ухищрений искусственно расширять встроенные коммуникационные возможности процессоров и контроллеров. Одним из таких способов, который хорошо подходит для механических контактов (кнопок), и является создание матрицы. Чтобы понять, как она работает, требуются некоторые базовые знания. Прежде, чем мы продолжим, пожалуйста, освежите в памяти закон Ома .
Немного теории
Чтобы разобраться, как работает цифровая электроника, надо усвоить два базовых принципа.Принцип первый гласит, что процесс коммуникации внутри схемы - это не передача или получение чего-то там. Чтобы обеспечить коммуникацию между двумя устройствами, вы просто соединяете между собой их выводы электропроводящим материалом. После этого предполагается, что состояние материала (напряжение и ток) на обоих его концах будет одинаковым. В реальности это, конечно, не так, но для медленных коммуникаций и коротких проводников наше предположение работает отлично. Выходит, что посылка и получение информации на самом деле является её совместным использованием.
Со стороны передатчика вы просто изменяете электрическое состояние проводника (запуская в него постоянный ток, изменяя его потенциал), рассчитывая на то, что приёмник сможет определить это изменение и правильно его понять.
Из этого принципа также следует, что между направлением коммуникации и направлением электрического тока нет никакой зависимости. Многие люди ошибочно предполагают обратное, и это мешает им понять, как работает электроника.
Если нужно послать логический уровень «0», то обычно для этого напряжение на выводе передатчика понижают до 0 В, и из приёмника в передатчик начинает течь ток, чтобы приёмник смог определить, что логический уровень соответствует «0». (Тогда как обратное направление тока означало бы, что где-то в схеме присутствует отрицательный потенциал - а этого, как правило, в цифровой электронике не бывает.) С другой стороны, для передачи логического уровня «1» прикладывают напряжение, равное напряжению питания, а так как это, чаще всего, самое высокое напряжение в схеме, то электрическому току не останется ничего другого, как потечь из передатчика в приёмник.
Принцип номер два заключается в том, что невозможно определить состояние проводника, не изменив это состояние. Неважно, собрались ли вы измерять напряжение или ток - в любом случае, для этого необходимо, чтобы через ваш измерительный прибор потекли электроны. Поток электронов - это и есть электрический ток, а раз он течёт, то значит, что в узле, к которому вы подключились для измерения, токи и напряжение уже изменились (см. законы Кирхгофа). Из этого следует, что если вам нужно «передать» информацию, изменив состояние вывода, электрически связанного с другим выводом, то для этого требуется поддерживать данное состояние, а значит, соблюдать все требования, налагаемые приёмником.
Кнопка
Механическая кнопка (а в данном контексте слово «механическая» не связано со словосочетанием «механическая клавиатура») - это просто пара металлических контактов, которые, соприкасаясь, электрически соединяют два вывода. Конечно, бывают и другие типы переключателей, конструктивно более сложные и имеющие большее количество выводов, но нам они не интересны, потому что в клавиатурах не используются.Ну, и как мы будем подключать кнопку ко входу микроконтроллера? Принципиально, любой вход может оперировать двумя возможными логическими уровнями: «0» и «1». Обычной практикой является принятие напряжений, близких к 0 В, за логический ноль, а напряжений, близких к напряжению питания (как правило, 5 В или 3,3 В) - за логическую единицу. Но проблема состоит в том, что управлять напряжением механическая кнопка сама по себе не может. Она управляет током - то есть, если мы соединим два узла с разным электрическим потенциалом через кнопку, то ток между этими узлами потечёт тогда и только тогда, когда кнопка будет нажата.
Но если мы добавим резистор, то очень просто сможем преобразовать ток в напряжение.
Кнопка с подтягивающим резистором
Взгляните на эту схему. Когда кнопка не нажата (цепь разорвана), ток через неё не течёт, поэтому напряжение в узле «A» будет близким к напряжению питания VCC (на самом деле, меньше VCC на величину падения напряжения на резисторе, равную R I). Когда кнопка нажата (цепь замкнута), ток течёт через резистор на землю. С учётом того, что сопротивление замкнутой кнопки очень мало (порядка сотен миллиом), напряжение в узле «A» будет близким к «0».
В данной конфигурации резистор называют подтягивающим, потому что он «подтягивает напряжение вверх» до уровня VCC. А без подключения к питанию через резистор никакого напряжения в узле «A» вообще бы не было (в таком случае вывод микросхемы называют «висящим в воздухе» или находящимся в высокоимпедансном состоянии).
Необходимо отметить, что внутри у большинства современных микроконтроллеров уже присутствуют подтягивающие резисторы, которые можно оперативно подключать или отключать при помощи программы. Так что, основным способом соединения кнопки с микроконтроллером является следующий: один вывод кнопки - ко входу микроконтроллера, другой вывод кнопки - к земле. В таком случае, если кнопка не нажата, то на микроконтроллер подаётся «1», а если нажата, то «0». Возможно, это и противоречит интуиции, но данный способ подключения - самый популярный.
Обратите внимание, что если мы оставим один из выводов кнопки висящим в воздухе, то есть никуда его не подключим, то эта кнопка работать не будет вообще: сколько её не нажимай, она никак не повлияет на электрическое состояние вывода микроконтроллера. Мы ещё воспользуемся этим свойством, когда будем составлять матрицу.
Принцип матрицы
Основным принципом клавиатурной матрицы является возможность подключать к одному входу микроконтроллера более одной кнопки.При помощи транзисторов или правильно сконфигурированных выходов микроконтроллера мы можем сделать так, что кнопки к земле будут подключаться по одной, в то время как остальные будут висеть в воздухе. Оставшиеся выводы каждой из кнопок объединены в один узел и подключены ко входу микроконтроллера. Я опустил подтягивающий резистор, так как мы знаем, что он уже присутствует внутри микроконтроллера, в его входном каскаде. Мы по очереди «включаем» каждую кнопку, соединяя её вывод номер 1 с землёй через соответствующий выход микроконтроллера, после чего на входе мы можем прочесть состояние кнопки, сняв напряжение с её вывода номер 2. Другие кнопки, подключённые к этому же входу, не влияют на его состояние, потому что их выводы номер 1 в данный момент времени висят в воздухе. Следующая схема иллюстрирует эту идею.

Много кнопок, один вход (узел «A»)
«A» - это единственный вход микроконтроллера, а «C1»..«Cn» - его выходы. На одном из выходов установлен логический «0», то есть внутри микросхемы этот контакт каким-то образом соединён с землёй - следовательно, ток всегда будет течь к этому контакту (в соответствии с первым базовым принципом). Теперь, когда нажмётся кнопка, подключённая к данному выходу, то через неё вход «A» сразу же «придавится» к земле, и он установится в «0». Нажатия на другие кнопки ничего не изменят, потому что их земляные выводы в данный момент времени никуда не подключены. Когда нам потребуется опросить следующую кнопку, мы убираем с текущего выхода логический «0» и устанавливаем этот уровень на следующий выход, так что в любой момент времени будет задействован только один из выходов микроконтроллера.
Такая конфигурация (когда выход либо подключён к земле, либо вообще отключён) называется выходом с открытым стоком (ОС) (исторически - с открытым коллектором (ОК)). Здесь я допустил некоторое упрощение - на самом деле, контакт не может быть полностью отключён от схемы, если только он физически от неё не отрезан. Но для простого цифрового ввода-вывода такое упрощение вполне подходит. Большинство микроконтроллеров предоставляют возможность программной конфигурации своих выходных контактов для работы в режиме ОС. Но что, если у нас нет такой возможности? Существует и другая конфигурация - двухтактный режим; на сегодняшний день этот вариант - один из самых популярных. Работает такая конфигурация немного по-другому. В состоянии «0» выход всё так же придавлен к земле, но когда наступает состояние «1», он подтягивается к напряжению питания VCC, так что выход в воздухе больше не висит, теперь он сам может стать источником тока.
Какие изменения это повлечёт в конструкции матрицы? Если мы не собираемся нажимать несколько кнопок одновременно, то никаких. Но если собираемся, то взгляните на рисунок и представьте на секунду, что тогда произойдёт. Нажимая на две кнопки, мы соединяем два нижних выхода в замкнутый контур. Если при этом один из них в состоянии «0», а другой - в состоянии «1», то от выхода, установленного в «1», к выходу, установленному в «0», потечёт электрический ток. А так как этот ток ничем не ограничен (нет резисторов), то мало того, что схема станет нестабильной, так ещё и чип может вылететь. Ну и, само собой, вряд ли получится нормально считать логическое состояние.
Добавление строк
Можете рассматривать предыдущий пример как матрицу, состоящую из одной строки. А теперь давайте увеличим её, нарастив дополнительные строки. В самом деле, если мы можем повесить на один вход целую строку, то почему мы не можем повесить на один выход целый столбец кнопок? Правда, есть обязательное условие - каждая кнопка столбца должна подключаться к отдельному входу микроконтроллера.Если мы расположим кнопки в форме обычной матрицы, то это условие выполнится автоматически. А на следующем рисунке показано, как будет выглядеть матрица кнопок, состоящая из n столбцов и m строк (на зелёные фигуры внимания пока не обращайте ).

Простая клавиатурная матрица
Считывать эту матрицу очень просто. Мы опрашиваем по одному столбцу за раз. Столбец для считывания выбирается путём соединения одного из выходов «C1»..«Cn» с землёй (выход в режиме ОС переводится в «0»). Теперь, поочерёдно опрашивая строки «R1»..«Rm», мы можем определить состояние каждой кнопки выбранного столбца. Кнопки из других столбцов ни на что не влияют, даже если они нажаты, потому что в данный момент их земляные выводы висят в воздухе (или, как говорят в электронике, находятся в состоянии Hi-Z).
После того, как будет опрошен весь столбец, мы переходим к следующему, отпустив текущий выход и придавив к нулю очередной. Сканирование матрицы считается оконченным, когда будут опрошены все столбцы. Если всё делать достаточно быстро, то интервалы между опросами столбцов не заметит и самый быстрый наборщик. Даже имея микроконтроллер 16 МГц, мы легко сможем сканировать всю матрицу тысячи раз в секунду, тогда как самый быстрый наборщик в тесте на hi-games.net добился скорости 203 слова в минуту (wpm) - то есть, чуть меньше, чем 17 нажатий в секунду.
Проектируя клавиатуру с использованием матрицы, мы уменьшаем количество выводов, требуемых для подключения всех клавиш. Но для того, чтобы свести число выводов к минимально возможному, нам надо составить матрицу таким образом, чтобы количество столбцов было как можно ближе к количеству строк. В идеальной ситуации, если количество кнопок равно n² , то лучшее, чего мы сможем добиться при помощи матрицы - это 2n занятых выводов микроконтроллера. Однако сегодня при составлении матриц редко кто стремится максимально уменьшить количество задействованных ног, ведь современные микроконтроллеры, как правило, обладают достаточным количеством свободных выводов. Вдобавок, максимальная оптимизация матрицы может впоследствии привести к неудобствам - заметно усложнится разводка платы или распределение проводов в конечном устройстве. Поэтому стоит пойти более удобным путём: при составлении матрицы пытаться следовать физическому расположению кнопок. В таком случае, для стандартной компьютерной клавиатуры самая простая матрица будет иметь всего 6 строк и некоторое количество столбцов, в зависимости от желаемой компоновки. Конечно, с точки зрения количества задействованных выводов это решение - не самое оптимальное, но зато в дальнейшем хотя бы упростится разводка.
А что, если выходов с открытым стоком у нас нет?
Вы можете спросить: а как нам быть, если в выбранном микроконтроллере всё-таки нет режима ОС? Ну, мы уже выяснили, какая неприятность может случиться, и что подтягивать выходы к VCC (то есть, «соединять» их с питанием) - не самая лучшая идея. Существует множество способов решения этой проблемы; среди них встречаются не только специальные выходные буферы ОС, но даже сдвиговые регистры с ОС-выходами - для ещё большей минимизации количества задействованных ног. Но есть и ещё один очень популярный приём, который довольно часто применяется в конструкциях компьютерных клавиатур (на самом деле, широко он применялся в былые времена).Проблема подключённых к двухтактным выходам столбцов проявляется в тот момент, когда вместе нажимаются две кнопки, находящиеся в одной строке, причём одновременно с этим нажатием происходит опрос столбца, в котором расположена одна из кнопок.

Проблема двухтактных выходов
Из выхода, который подтянут к «1» (а не висит в состоянии Hi-Z), начинает течь ток. Он проходит через ближайшую замкнутую кнопку, затем - через замкнутую кнопку в опрашиваемом столбце, и, наконец, втекает прямиком в выход, установленный в «0». Это может привести к чему угодно - начиная с невозможности надёжного считывания состояния клавиатуры и заканчивая выходом из строя самого микроконтроллера.
Но раз уж мы вынуждены как-то бороться с этой проблемой, то можем применить отличный трюк: превратить двухтактный выход в подобие выхода с открытым стоком. Я часто сталкивался с этим решением в конструкциях старых клавиатур. Учитывая, что ток должен только втекать в выходы (подключённые к столбцам), но никогда не вытекать из них, мы можем ограничить направление тока при помощи диодов. Диод - это простое устройство, которое позволяет току течь только в одном направлении. В изображении диода на электрической схеме треугольник символизирует стрелку, которая указывает это направление. Если поставить по диоду между каждым выходом микроконтроллера и проводником соответствующего столбца матрицы, то мы добьёмся поставленной цели - теперь ток может только втекать в выходы, ведь указанные проводники дотягиваются до каждой кнопки своего столбца. Получается, что из выхода, установленного в «1», ток никуда не потечёт, а это почти что превращает его в выход с открытым стоком. Конечно, до настоящего ОС он не дотягивает, но зато решает нашу проблему замкнутого токового контура в клавиатурной матрице. Вернитесь к предпоследнему рисунку матрицы, но на этот раз примите во внимание зелёные диоды , чтобы понять, как работает этот трюк.
Естественно, имеет смысл минимизировать количество диодов. Для этого можно уменьшить число столбцов, увеличив количество строк. А если получившийся результат плохо вписывается в реальную компоновку клавиатуры, то можно «развернуть» матрицу на 90° (поменять местами строки со столбцами). Возможности безграничны. Но в наши дни появилось огромное количество микроконтроллеров, которые просты в использовании и удобны для хоббистов, поэтому сегодня в проектах доморощенных клавиатур описанный приём уже практически не используется. К счастью.
Фантомные нажатия (Ghosting)
Если вы интересуетесь клавами, то, должно быть, уже встречались с этим термином. К сожалению, в мире клавиатур его часто интерпретируют неправильно.Мы уже знакомы с ситуацией, когда одновременное нажатие нескольких кнопок, находящихся в одной строке, может помешать нормальному считыванию матрицы. И эта проблема, можно сказать, нами решена. А теперь давайте посмотрим, что случится, если нажать несколько кнопок, находящихся одновременно в одной строке и в одном столбце.

Пример фантомного нажатия
На рисунке три кнопки нажаты одновременно. Две из них находятся в столбце «C2», и две - в строке «Rm». Это значит, что одна из нажатых кнопок делит строку с другой нажатой кнопкой, а столбец - с третьей нажатой кнопкой. Именно в такой ситуации и происходит фантомное нажатие . Представьте, что в данный момент мы опрашиваем столбец «C1» (то есть, он придавлен к земле - находится в состоянии «0»). Такой характерный аккорд нажатых кнопок приводит к следующему: даже несмотря на то, что левая верхняя кнопка не нажата, строка «R2» находится в состоянии «0», потому что она придавлена к земле столбцом «C1» (находящемся в «0») через три нажатые кнопки. В результате клавиатурный контроллер считывает левую верхнюю кнопку, как «нажатую», вне зависимости от того, нажата она на самом деле или нет. Описанная ситуация называется фантомным нажатием (ghosting ), потому что некоторые комбинации одновременно нажатых кнопок вызывают фантомные срабатывания других кнопок (ghost keypresses), хотя физически эти другие кнопки и не нажаты.
Конечно, существуют способы оградить наборщиков и геймеров от фантомных срабатываний, и эти способы широко применяются в современных компьютерных клавиатурах. Можно поймать момент возникновения фантомного нажатия и заблокировать его. Обычный человек не в состоянии одновременно нажать или отпустить две клавиши с идеальной точностью. Поэтому, сканируя матрицу достаточно быстро, мы можем предположить, что между двумя проходами по матрице изменить своё состояние может не больше одной кнопки. В таком случае, контроллер принимает одиночные нажатия и следит за возникновением ситуаций, когда между проходами матрицы оказываются нажатыми две кнопки или более. Учитывая, что сканирование матрицы происходит со скоростью, при которой штатное возникновение таких ситуаций крайне маловероятно, можно заключить, что одна из только что нажатых кнопок - фантом. Поэтому контроллер должен проигнорировать все эти нажатия. Кроме того, безопаснее сразу не сообщать компьютеру об изменениях статуса клавиатуры - сначала имеет смысл подождать, пока все эти срабатывания не пропадут.
Есть и другой подход. Можно выявить ситуацию, когда срабатывает «третья» кнопка, и заблокировать как это нажатие, так и все последующие. Блокировку не снимать до тех пор, пока фантомное срабатывание не пропадёт, и ситуация опять не станет нормальной. Для реализации этого подхода программа должна помнить, какие именно кнопки сейчас нажаты (а обычно она это помнит и так), чтобы отклонять последующие срабатывания кнопок, в строках и в столбцах которых уже зафиксированы одновременные нажатия. Если написать программу с умом, то блокироваться будут только проблемные срабатывания, а все последующие будут приниматься как обычно - кроме тех, что снова нарушат правила. Раз контроллер отвергает нажатие каждой кнопки, уже имеющей одновременные срабатывания в своей строке и столбце, то выходит, что в зависимости от статуса одних кнопок, другие могут не регистрироваться вообще. Эта ситуация широко известна как блокирование (jamming ). То есть кнопки, которые препятствуют одновременным срабатываниям других кнопок, получается, «блокируют» часть клавиатуры.
С точки зрения пользователя, можно одновременно нажать все кнопки из одного столбца (не нажимая кнопок из другого), но одновременно нажать все кнопки из одной строки можно только в том случае, если в столбце у каждой из этих кнопок зафиксировано не более одного срабатывания. То же самое относится и к нажатию кнопок из одного столбца - дополнительные срабатывания фиксируются только в том случае, если кнопки находятся в строках, которые «не заняты».
Люди часто путают «фантомное срабатывание » и «блокирование срабатывания » («ghosting » и «jamming »), что лично для меня является загадкой - по-моему, эти термины вполне интуитивны.
В клавиатурах с использованием таких матриц, как мы только что рассмотрели, невозможно избежать ни фантомных срабатываний, ни блокирования. Поскольку фантомные срабатывания в повседневной работе недопустимы, то для борьбы с ними практически все производители резинокупольных клавиатур пускают в ход различные ухищрения, и в игру вступает блокирование. Вопрос: как составить матрицу таким образом, чтобы блокирование возникало как можно реже и не вызывалось бы распространёнными клавиатурными комбинациями? На самом деле, это - хорошая тема для целой книги; именно поэтому матрицы ширпотребовских клавиатур такие запутанные и всегда блокируют хорошее настроение (типа, каламбур).
Диоды на все кнопки - кардинальное решение
Если вы ещё раз взглянете на картинку про фантомные нажатия, то сможете заметить, что во всём виновата правая нижняя кнопка.А ведь эта кнопка - единственная, через которую ток в данной ситуации течёт «вверх». Так что, если мы не хотим, чтобы текущие «вверх» токи мешали нам нормально считывать матрицу, то давайте введём диоды, чтобы ток мог идти по столбцам строго сверху вниз, втекая в выходы микроконтроллера.
К сожалению, сэкономить тут не получится - придётся ставить по диоду на каждую кнопку. Если же говорить о полярности, то вы уже должны были разобраться, что в данном конкретном случае диоды должны пропускать ток «сверху вниз», то есть их катоды («кончики стрелок») должны смотреть на выходы микроконтроллера (столбцы), тогда как аноды должны быть обращены ко входам (строкам).

Итоговая матрица
Не имеет значения, с какой стороны кнопки располагать диод; главное - соблюсти верную полярность. Просто запомните, что в данном случае ток всегда будет течь от входов к выходам. К слову, если входы подтянуты к питанию, а выходы - в режиме ОС, то так происходить будет всегда.
При данном подходе получается, что ток всегда будет течь «вправо вниз», и это исключает появление замкнутых токовых контуров при одновременном нажатии нескольких кнопок. Кроме того, эта конструкция - единственная, которая может обеспечить клавиатуре полный NKRO. Вдобавок, нелишним будет упомянуть (хотя это и кажется очевидным), что проблема отсутствия у выходов микроконтроллера режима ОС решается теперь автоматически. Диоды, установленные последовательно с каждой кнопкой, избавляют выходы от замыкания не хуже рассмотренного ранее варианта, где предполагалось дополнительно ставить по диоду на каждый столбец.
Ролловер (Rollover)
Да, я знаю, что текст и так уже слишком длинный. Но я всё-таки добавлю эту последнюю главу, потому что, по-моему, без неё статья будет неполной. Так вот, ролловер - это способность клавиатуры воспринимать несколько нажатий одновременно.xKRO
KRO означает клавишный ролловер (key rollover ), и обычно эта аббревиатура озаглавлена каким-то числом. Например, 2KRO означает двухклавишный ролловер. Клавиатура обладает x -клавишным ролловером тогда и только тогда, когда она способна зарегистрировать x одновременных нажатий, причём - вне зависимости от того, какие кнопки и в какой последовательности были задействованы. Большинство современных резинокупольных клавиатур обладают 2KRO. Из этого, однако, не следует, что допустимое количество нажатий у этих клавиатур всегда будет ограничено числом x . На самом деле это означает, что поддержка x одновременных нажатий гарантируется точно.В зависимости от конструкции матрицы и от типа контроллера, две клавиатуры 2KRO от разных производителей могут вести себя совершенно по-разному. Одна может всегда воспринимать только два одновременных нажатия, а другая с лёгкостью переварит и больше. Думается, последняя клавиатура была заявлена 2KRO потому, что некоторые комбинации клавиш (скорее всего, маловероятные) всё-таки будут вызывать у неё блокирование нажатий других кнопок. А так как это означает, что при работе с данной клавиатурой определённые комбинации из трёх клавиш и более срабатывать не будут, то компания и объявила её 2KRO.
NKRO
Термин NKRO означает N-клавишный ролловер , и его используют для обозначения клавиатур, поддерживающих, несмотря ни на что, любую комбинацию одновременно нажатых клавиш. Но имейте в виду, что NKRO матрицы и NKRO клавиатуры - это две большие разницы. К примеру, если итоговая реализация матрицы, рассмотренная нами в статье, поддерживает NKRO (с учётом корректно написанной прошивки), то из этого совсем не следует, что клавиатура, использующая данную матрицу, тоже будет поддерживать NKRO. Это может происходить из-за ограничений, накладываемых коммуникационными портами, к которым подключается клавиатура; другой причиной может стать бережливость производителей, вечно экономящих то здесь, то там. Проблему NKRO при соединении с PS/2 и USB я попытаюсь разъяснить в следующих частях.Итог
Конечно, простыня вышла изрядная, но ведь концепция не такая уж и простая - особенно для читателя, который не является инженером-электронщиком. Надеюсь, мне удалось всё объяснить; как бы то ни было, писать я старался как можно понятнее. Поэтому кому-то из вас статья могла показаться довольно скучной. Ну, а если вы шарите в электронике, то, скорее всего, читать вам её вообще не стоило;)В любом случае, пожалуйста,
На страницах этого сайта уже была представлена работа по созданию и использованию клавиатуры, но она была сенсорная . Те, кому нужен вариант попроще, чаще выбирают стандартные кнопочные клавиатуры, в которых кнопки соединены матрицей. Такое соединение кнопок позволяет сократить число выводов необходимых для подключения к микроконтроллеру.
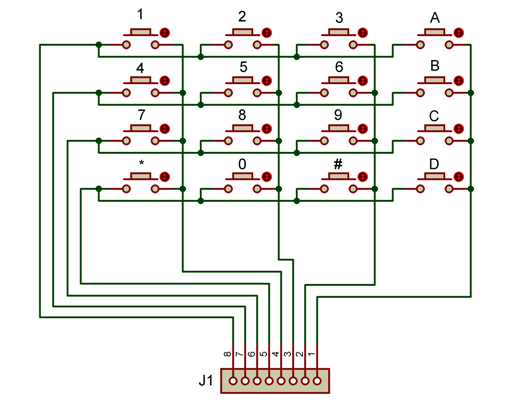
Чаще всего встречаются клавиатуры 3х4 и 4х4 с 12-ю и 16-ю кнопками, соответственно. У меня в руках оказалась клавиатура 4х4. Работу с ней сейчас и рассмотрим.
У меня оказалась вот такая клавиатура с мембранными контактами. Хороша тем, что в толщину составляет всего 1 мм и легко может приклеиваться к нужным поверхностям.
Потыкав по кнопкам, с помощью мультиметра установил как соединены кнопки внутри клавиатуры.
Для сканирования матричных клавиатур в Bascom-AVR существует специальная функция Getkbd () . Эта команда заточена под использование клавиатур 4х4, поэтому она использует все 8 выводов одного порта микроконтроллера. И в случае использования клавиатур c меньшим числом кнопок стоит это учитывать.
Конфигурирование команды заключается в назначении порта, к которому будет подключена клавиатура, время прохождения дребезга контактов и задержка после определения нажатия
к примеру, в следующей строке:
Config Kbd = Portd , Debounce = 20 , Delay = 100
сконфигурировано подключение клавиатуры к PortD, время дребезга установлено 20 мс, время задержки после нажатия 100 мс
Эта команда берет на себя всю работу по сканированию строк клавиатуры и возвращает переменной номер нажатой клавиши от 0 до 15. Если нажатия на кнопку не зафиксировано, тогда функция вернет число 16. Дальше, в зависимости от того как соединены кнопки, может потребоваться узнать символ нажатой кнопки.
В приведенном ниже примере, сканирование клавиатуры происходит с частотой 10 Гц и находится в главном цикле программы. Результат нажатий выводится на ЖК дисплей.
$regfile
=
"m8def.dat"
$crystal
=
1000000
"конфигурация дисплея
Config
Lcdpin
=
Pin
,
Rs
=
Portc
.
0
,
E
=
Portc
.
1
,
Db4
=
Portc
.
2
,
Db5
=
Portc
.
3
,
Db6
=
Portc
.
4
,
Db7
=
Portc
.
5
Config
Lcd
=
20
*
4
Cursor
Off
Cls
"конфигурация клавиатуры
Config
Kbd
=
Portd
,
Debounce
=
20
,
Delay
=
100
"переменные
Dim
Key_char
As
Byte
"номер нажатой клавиши
Dim
Key_str
As
String
*
1
"символ нажатой клавиши на клавиатуре
Dim
Result
As
String
*
20
"результат нажатий на клавиатуру
Result
=
""
"Главный цикл программы
Do
Key_char
=
Getkbd
()
"клавиша не нажата и функция возвращает переменной значение 16
If
Key_char
<>
16
Then
"если переменная не равна 16, значит была нажата кнопка
Key_str
=
Lookupstr
(key_char
,
Keyboard_data
)
"вытаскиваем символ нажатой клавиши
Result
=
Result
+
Key_str
End
If
Locate
1
,
1
Lcd
Result
"выводим на дисплей результат нажатий
Waitms
100
Loop
End
Keyboard_data
:
Data
"1"
,
"4"
,
"7"
,
"*"
,
"2"
,
"5"
,
"8"
,
"0"
Data
"3"
,
"6"
,
"9"
,
"#"
,
"A"
,
"B"
,
"C"
,
"D"
А вот тестовая схемка, по которой подключаются дисплей и клавиатура:
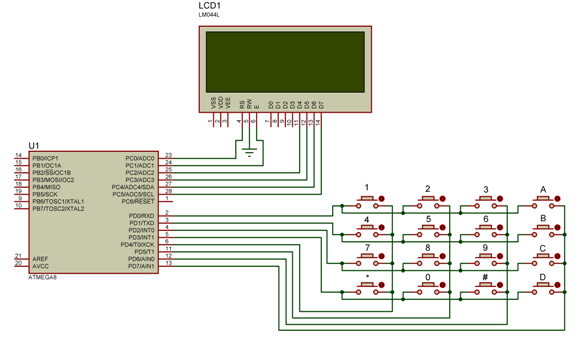
Еще в схему не мешало бы добавить токоограничительные резисторы на линию клавиатуры, номиналом 100-150 Ом. На всякий случай, но для пробы сойдет и так (главное не нажимать сразу несколько кнопок)
Подключаем, прошиваем, тыкаем на кнопки и видим результат - на дисплей выводятся символы нажатых клавиш:

Позже добавлю демонстрационное видео, как только найду чем снять в приличном качестве.
А пока можно скачать архив в котором находится файл для симуляции в Proteus и прошивка.
-
 17 апреля 2015Установка шаблона Joomla
17 апреля 2015Установка шаблона Joomla -
 17 апреля 2015Как зарабатывать деньги на Webmoney: реальные способы
17 апреля 2015Как зарабатывать деньги на Webmoney: реальные способы







